在SMI的Tools下拉選單>> 選Tuner

進入Tuning視窗,選擇Tuning Values,開始調整

填入PID數值後,選取"Apply New Values",並儲存"Save Values"後,按下"Run Tuning",觀察曲線
(建議起始KP依照負載大小填入30~50的數值,KI與PD先為0)

STEP 1
首先,我們先將 KP 值增加一點點,由圖面的範例可以知道,KP 值太小,並未達到命令位置值。
所以,下一步,我們必須再增加 KP值,直到實際位置超越命令位置值。

STEP 2
增加 KP 值,直到如圖面所示,稍微超過命令位置值一點。
接下來,增加KD 值,減低過衝的發生。

STEP 3
增加 KD 值後,由圖可知,曲線變得更接近命令值了。
接下來必須增加 KP 值,讓曲線產生震盪或是完全高於命令值。

STEP4
在反覆增加 KP 值後,變成如下圖所示,它代表KP 太高、或是KD 太低。
接下來,我們試著提升KD 值來抑制過衝以及
高頻震動的問題。

STEP5
提升 KD 值後,過衝的問題已改善了,但是仍然有高頻震動發生,那就表示KP 以及KD 值太高了。
下一步,我們應該先試著降低KD 值。

STEP6
減少 KD 值後發現,並沒有大幅減少高頻震動的發生。
所以,我們應該降低 KP 值。

STEP7
降低了 KP 值後確實讓震動停止了,然而,還是有一點點過衝的狀況。
我們要再一次提高 KD 值來抑制過衝的問題。

STEP8
提高了 KD 值之後,過衝的狀況減少了,但是高頻震動又發生了,這樣表示KD 值仍然太高了。
下一步,我們要降低 KD 值減少高頻震動發生。
STEP9
在減少KD值之後,停止了高頻震動的發生。
接下來應該減少 KP 值。

STEP10
在減少了 KP 值後,過衝的改善並沒有很明顯(可能KD 值在步驟九的時候減少太多了)。
所以,我們應該提升 KD 值,直到過衝的情況改善。
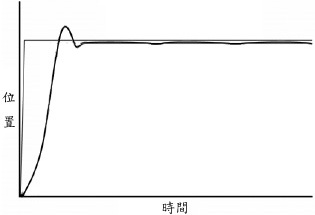
STEP11
當我們再提升 KD 值,如圖所示,回應迅速並且穩定。

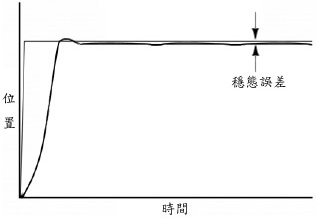
STEP12
最後,調整KI 值消除穩態誤差,並讓整定的時間更快速更穩定。
KP、KI、KD 會相互影響,必要時需再調整KP,KD 值。